


Explora el Kit Nezha V2: Innovación en Educación STEM
En el Colegio Cumbre-Oxford hemos comenzado a trabajar con el Kit Nezha Inventor’s V2, dentro del programa de robótica y pensamiento computacional. Este material forma parte del proyecto Escuela 4.0, que busca acercar a los alumnos al mundo de la programación, la ciencia y la ingeniería de una forma práctica, creativa y divertida.
Durante las sesiones, los alumnos están aprendiendo a construir y programar robots a partir de bloques y sensores, comprendiendo el funcionamiento de los distintos componentes del kit y aplicando los principios básicos del movimiento mecánico.
Uno de los primeros proyectos que hemos comenzado a explorar es el siguiente ejemplo:
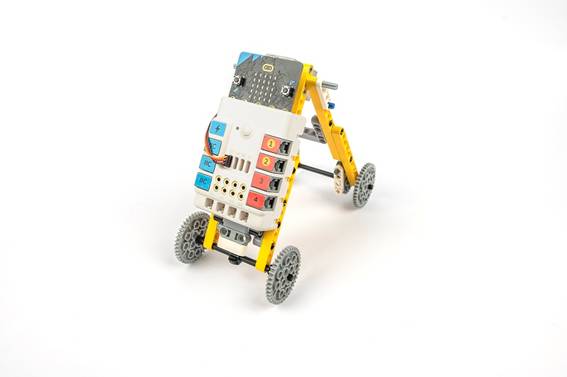
El Crawler Mecánico
Las orugas son pequeñas larvas de insectos que suelen tener cuerpos blandos y peludos. Las orugas son la etapa larvaria de insectos como mariposas y polillas, en la que se preparan para convertirse en adultos alimentándose y creciendo. El cuerpo de la oruga consta de varios segmentos, cada uno con un par de patas por las que se desplazan.
Las orugas se arrastran deslizándose por sus cuerpos. Sus patas se mueven alternativamente, impulsándolos hacia adelante. Esta forma de arrastrarse les permite desplazarse libremente por diversas superficies, como hojas, ramas y el suelo.
Usaremos el Nezha Inventor’s Kit V2 para crear un vehículo mecánico que imite la forma en que se mueve una oruga.
- Conozca los componentes y funciones básicos del kit Nezha Inventor’s V2.
- Aprenda a utilizar el timón para controlar el movimiento de la oruga mecánica.
- Explora las características y el movimiento del arrastre de las orugas.
- Desarrollar la creatividad, la capacidad de resolver problemas y la capacidad de trabajar en equipo.
Nos adentraremos en un mundo de emoción y exploración divertida mientras aprendemos juntos a crear un robot mecánico que imita el movimiento de una oruga con el Kit de Invención Nezha V2. En este proyecto, aprenderemos a usar nuestros conocimientos de ciencia e ingeniería para controlar el movimiento del robot mecánico con un timón. ¡Exploremos el proceso de creación de este emocionante robot!
Los estudiantes piensen sobre cómo pueden construir un vehículo mecánico a partir de materiales hechos con bloques.
- ¿Cómo se logra el reptante movimiento de la oruga? ¿Cuáles son sus características y patrones?
- ¿Cómo se puede utilizar el timón para controlar el movimiento de la oruga mecánica de manera que imite los movimientos de arrastre de una oruga?
- ¿Cómo se puede ajustar el ángulo y la velocidad del timón para que los movimientos de arrastre de los rastreadores mecánicos sean más realistas?
- ¿Cómo se puede lograr el equilibrio y la estabilidad de las orugas mecánicas mediante un diseño y ajuste racionales?
